
Goal: Track the flight of a rocket ship and graph its path in 3D space. Please make sure you have the latest version of Python 3 installed on your computer. Two Alternative Solutions Solution 1. Two Microbit Solution Microbit 1. Inside Rocket (Sender) This microbit, when started (either on Reset or when A-Button pressed) BEGIN TURN ON RADIO CONFIG RADIO to Channel 19, Power 7 start=False message = "" WHILE True THEN message = RADIO.Receive ##WHILE message = "start" DO IF message = "start" then co-ords = Get Accelerometer Values (x,y,z) RADIO send(co-ords) ELSE IF message = "stop" then print("Stop") ELSE print ("Unknown message: <message>) END If END WHIE END SAMPLE CODE ## Sender - stored inside Rocket ## When RESET pressed will: ## 1. Sleep until receive a "Start" from Receiver ## a. Gets x,y,z acceleration from accelerometer ## b. Formats it as comma separated list ## c. Uses Radio to broadcast this data ## 2. Receives Message from Receiving Microbit to Start/Stop ## NOTE: Change the Channel to a unique number with Receiver to prevent overlap ## from microbit import * import radio radio.on() radio.config(channel=19, power=7) def sendData(): x=accelerometer.get_x() y=accelerometer.get_y() z=accelerometer.get_z() coords="{},{},{}".format(x,y,z) radio.send(coords) display.show(Image.HEART_SMALL) sleep(100) display.show(Image.HEART) start = False while True: sleep(20) if start: sendData() message = radio.receive() if message=="start": start=True display.show(Image.SMILE) elif message=="stop": start=False display.show(Image.SAD) Microbit 2. Remote Control (Receiver) SAMPLE CODE ## ## The Receiver's job is to: ## 1. Notify the Sender to Start/Stop ## 2. Receive Messages from the Sending Microbit. ## NOTE: Change the Channel number in the Sender and Receiver ## to prevent overlap from another Microbit ## from microbit import * import radio radio.on() radio.config(channel=19, power=7) ## File stored on Microbit for future download filename = "datalog.txt" def receiveData(f): message = radio.receive() print(message) msg=str(message).split(",") print(msg) f.write("{}\n".format(msg)) #x=msg[0] #y=msg[1] #z=msg[2] #print(x,y,z) with open(filename,"w") as f: start=False while True: if button_a.was_pressed(): radio.send("start") display.show(Image.SMILE) start=True if button_b.was_pressed(): radio.send("stop") display.show(Image.SAD) start=False if start: receiveData(f) sleep(200) Solution 2. Single Microbit Solution Step 1. Track Flight. We achieve this by using a device that has an Accelerometer and Data Logger. The device we are using here is a BBC Micro:bit. This device has these features built into it. A. Coding Accelerometer and Data Logger. Microbit can be coded using several languages, including MicroPython. The code may be programmed on a computer using the Mu IDE (A simple python programming tool). This IDE is specially designed for using with Microbit. Note: Microbit has 30KB onboard File System. This file system is used to store program files and small data files. Programs written in Mu can be directly converted into a Binary File (Machine code) or in Microbit it is a HEX file, and downloaded directly (term: flash) to the Microbit. Data Logging Algorithm Sample code can be found on GitHub: https://github.com/jlaispx/Microbit_Datalogger Single Microbit Solution
Running datalogger Without Mu, running datalogger on microbit is quite complicated. But because of the smooth integration to microbit, there is a button "Flash" to achieve this.
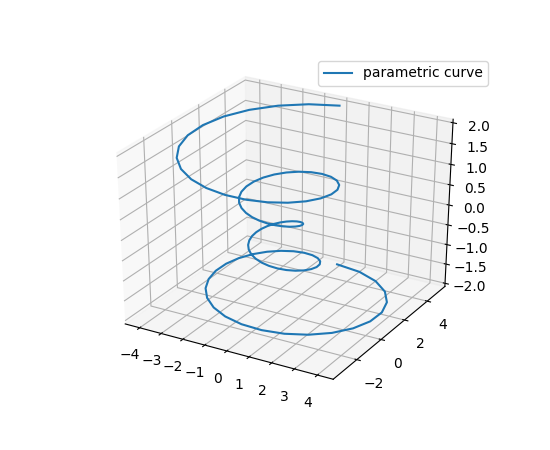
Note: Microbit will also do a syntax check using MicroPython (embedded on device), and will display any errors on the LED display on microbit. B. Retrieving Datalog File To retrieve the datalog file from the Microbit file system, you need to be able to connect to the device using Microfs, as special Python package that, once installed on your computer, will allow you to PUT and GET files to /from Microbit to your Windows file system. C. Using Datalog File The Datalog file was created with "x,y,z" acceleration values recorded on a pre-determined time (rate). We can then create some sort of 3D plotting program that draws the path based on the co-ordinates stored in the file. Python has package called MatPlotLib that can be programmed to take a set of x, y and z co-ords and plot them on a 3D Graph, that visually represents the path of the microbit Plotting Algorithm
APPENDIX Mu IDE Microfs A simple command line tool and module for interacting with the limited file system provided by MicroPython on the BBC micro:bit. To install:
Briefly, How it works.... Copy a file onto the device: $ ufs put path/to/local.txt Get a file from the device: $ ufs get remote.txt Matplotlib This is a multi-purpose graphing package for Python. To install from CMD:
 |
|
|